
ဘာသာစကား
ကုန်ပစ္စည်းရှာဖွေခြင်း။
ဘာသာစကား
- English
- 简体中文
- Тоҷикӣ
- O'zbek
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel

ကုမ္ပဏီသတင်း
အမြဲတမ်း Magnet ပေါင်းစပ်ထားသော ဆွဲငင်အားစက်များ၏ Star-Sealing တွက်ချက်ခြင်းနှင့် အသုံးချခြင်းဆိုင်ရာ သုတေသန
2025-08-07
နောက်ခံ
Permanent Magnet Synchronous Motors (PMSMs) ကို ခေတ်မီစက်မှုလုပ်ငန်းနှင့် နေ့စဥ်ဘဝတွင် ကျယ်ကျယ်ပြန့်ပြန့် အသုံးပြုကြပြီး စွမ်းဆောင်ရည်မြင့်မားမှု၊ စွမ်းအင်ချွေတာမှုနှင့် ယုံကြည်စိတ်ချရမှုတို့ကြောင့် ၎င်းတို့ကို နယ်ပယ်များစွာတွင် နှစ်သက်သော ပါဝါစက်ပစ္စည်းများ ဖြစ်လာစေပါသည်။ အဆင့်မြင့်ထိန်းချုပ်နည်းပညာများဖြင့် အမြဲတမ်းသံလိုက်ပြိုင်တူဆွဲတင်သည့်စက်များသည် ချောမွေ့သောရုပ်ကြွလှုပ်ရှားမှုကိုပေးစွမ်းရုံသာမက ဓာတ်လှေကားကား၏ တိကျသောနေရာချထားမှုနှင့် ဘေးကင်းရေးအကာအကွယ်များကိုလည်း ရရှိစေပါသည်။ ၎င်းတို့၏ ကောင်းမွန်သော စွမ်းဆောင်ရည်ဖြင့် ၎င်းတို့သည် ဓာတ်လှေကား စနစ်များစွာတွင် အဓိက အစိတ်အပိုင်းများ ဖြစ်လာခဲ့သည်။ သို့သော် ဓာတ်လှေကားနည်းပညာ၏ စဉ်ဆက်မပြတ် ဖွံ့ဖြိုးတိုးတက်လာသည်နှင့်အမျှ၊ အမြဲတမ်း သံလိုက်ပြိုင်တူဆွဲတင်စက်များအတွက် စွမ်းဆောင်ရည်လိုအပ်ချက်များ အထူးသဖြင့် သုတေသနဟော့စပေါ့ဖြစ်လာသည့် "ကြယ်တံဆိပ်ခတ်ခြင်း" နည်းပညာကို အသုံးချမှု တိုးလာပါသည်။
သုတေသနကိစ္စများနှင့် အရေးပါမှုများ
အမြဲတမ်းသံလိုက်ထပ်တူဆွဲဆွဲစက်များတွင် ကြယ်တံဆိပ်ခတ်ခြင်း၏ ရိုးရာအကဲဖြတ်မှုသည် သီအိုရီတွက်ချက်မှုများနှင့် တိုင်းတာထားသောဒေတာမှဆင်းသက်လာမှုအပေါ် မူတည်ပြီး ကြယ်တံဆိပ်ခတ်ခြင်း၏အလွန်အမင်းဖြတ်တောက်ခြင်းလုပ်ငန်းစဉ်များနှင့် လျှပ်စစ်သံလိုက်စက်ကွင်းများ၏ မျဉ်းဖြောင့်မဟုတ်သည့်အတွက် ထိရောက်မှုနှင့် တိကျမှုနည်းပါးသည်။ ကြယ်တံဆိပ်ခတ်စဉ်အတွင်း ကြီးမားသောလျှပ်စီးကြောင်းသည် အမြဲတမ်းသံလိုက်များ၏ နောက်ပြန်လှည့်၍မရသော သံလိုက်များကို အကဲဖြတ်ရန် ခက်ခဲသည့်အပြင် အကဲဖြတ်ရန်ခက်ခဲသည်။ ကန့်သတ်ဒြပ်စင်ခွဲခြမ်းစိတ်ဖြာမှု (FEA) ဆော့ဖ်ဝဲလ်ကို ဖွံ့ဖြိုးတိုးတက်မှုနှင့်အတူ၊ ဤပြဿနာများကို ဖြေရှင်းပြီးဖြစ်သည်။ လက်ရှိတွင်၊ သီအိုရီဆိုင်ရာ တွက်ချက်မှုများကို ဒီဇိုင်းလမ်းညွှန်ရန် ပိုမိုအသုံးပြုကြပြီး ၎င်းတို့ကို ဆော့ဖ်ဝဲလ်ပိုင်းခြားစိတ်ဖြာချက်နှင့် ပေါင်းစပ်ခြင်းသည် ကြယ်တံဆိပ်ခတ်ခြင်းအား မြန်ဆန်ပြီး ပိုမိုတိကျသော ခွဲခြမ်းစိတ်ဖြာမှုကို ဖြစ်ပေါ်စေပါသည်။ ဤစာတမ်းသည် ၎င်း၏ကြယ်တံဆိပ်ခတ်လည်ပတ်မှုအခြေအနေများကို အကန့်အသတ်မရှိ ခွဲခြမ်းစိတ်ဖြာမှုပြုလုပ်ရန် နမူနာတစ်ခုအနေဖြင့် အမြဲတမ်းသံလိုက်ထပ်တူဆွဲခြင်းစက်ကို ယူဆောင်သည်။ ဤလေ့လာမှုများသည် အမြဲတမ်းသံလိုက်ပြိုင်တူဆွဲစက်များ၏ သီအိုရီပိုင်းဆိုင်ရာစနစ်ကို ကြွယ်ဝစေရုံသာမက ဓာတ်လှေကားဘေးကင်းရေးစွမ်းဆောင်ရည်ကို မြှင့်တင်ရန်နှင့် စွမ်းဆောင်ရည်ပိုကောင်းစေရန်အတွက် ခိုင်မာသောပံ့ပိုးမှုပေးပါသည်။
Star-Sealing တွက်ချက်မှုများတွင် Finite Element Analysis ကိုအသုံးပြုခြင်း။
သရုပ်ဖော်မှုရလဒ်များ၏ တိကျမှန်ကန်မှုကို အတည်ပြုရန်၊ အဆင့်သတ်မှတ်အမြန်နှုန်း 159 rpm ဖြင့် လက်ရှိစမ်းသပ်ဒေတာပါရှိသော ဆွဲငင်အားကို ရွေးချယ်ထားသည်။ ကွဲပြားခြားနားသောအမြန်နှုန်းဖြင့် ကြယ်ပွင့်တံဆိပ်ခတ်ထားသော ရုန်းအားနှင့် အကွေ့အကောက်များကို တိုင်းတာသည့် တည်ငြိမ်သောအခြေအနေမှာ အောက်ပါအတိုင်းဖြစ်သည်။ star-sealing torque သည် အမြင့်ဆုံး 12 rpm တွင် ရောက်ရှိသည်။
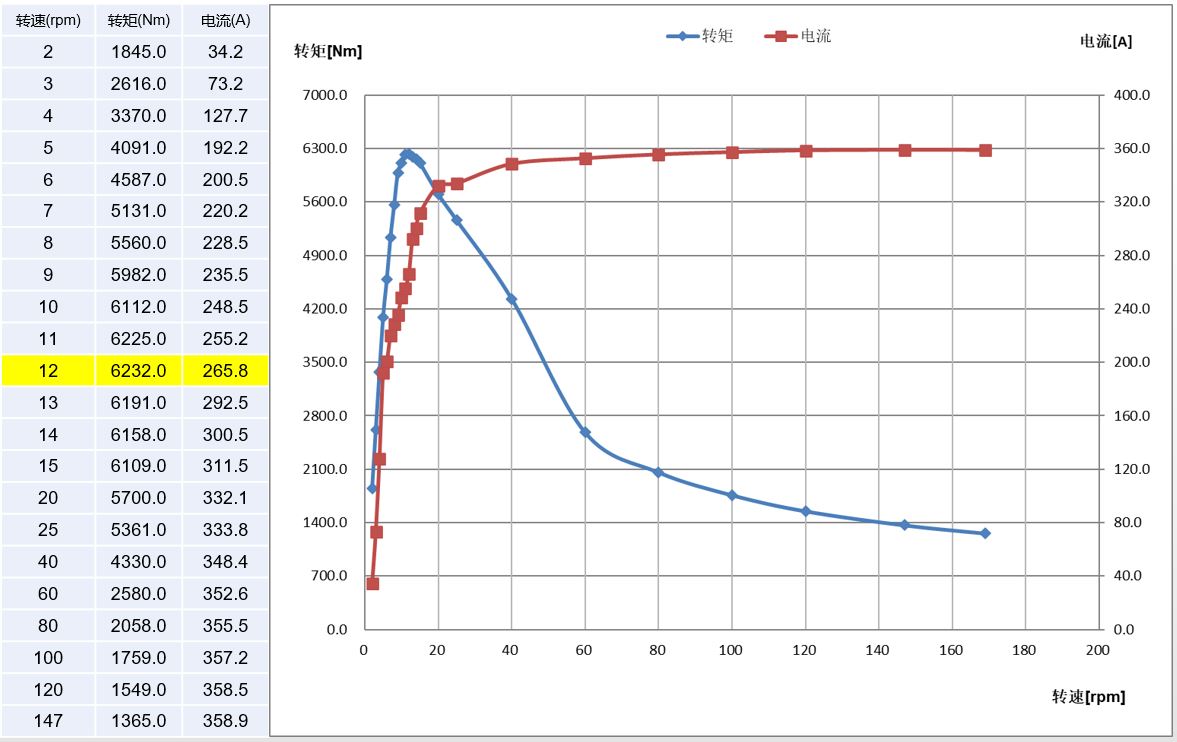
ပုံ 1- ကြယ်တံဆိပ်ခတ်ခြင်း၏ တိုင်းတာမှုဒေတာ
ထို့နောက် Maxwell ဆော့ဖ်ဝဲလ်ကို အသုံးပြု၍ ဤဆွဲငင်အားစက်၏ အကန့်အသတ်ရှိသော အစိတ်အပိုင်းခွဲခြမ်းစိတ်ဖြာမှုကို ပြုလုပ်ခဲ့သည်။ ပထမဦးစွာ၊ ဆွဲငင်စက်၏ ဂျီဩမေတြီပုံစံကို တည်ထောင်ခဲ့ပြီး သက်ဆိုင်ရာ ပစ္စည်းဂုဏ်သတ္တိများနှင့် နယ်နိမိတ်အခြေအနေများကို သတ်မှတ်ခဲ့သည်။ ထို့နောက်၊ လျှပ်စစ်သံလိုက်စက်ကွင်းညီမျှခြင်းများကိုဖြေရှင်းခြင်းဖြင့်၊ မတူညီသောအချိန်များတွင် အမြဲတမ်းသံလိုက်များ၏ အချိန်-ဒိုမိန်းလက်ရှိမျဉ်းကွေးများ၊ torque မျဉ်းကွေးများနှင့် demagnetization အခြေအနေများကို ရရှိခဲ့သည်။ တိုင်းတာမှုရလဒ်များနှင့် တိုင်းတာသည့်ဒေတာအကြား ကိုက်ညီမှုရှိမရှိကို စစ်ဆေးပြီးဖြစ်သည်။
ဆွဲငင်စက်၏ အကန့်အသတ်ရှိသော ဒြပ်စင်ပုံစံကို တည်ထောင်ခြင်းသည် လျှပ်စစ်သံလိုက်ခွဲခြမ်းစိတ်ဖြာမှုအတွက် အခြေခံဖြစ်ပြီး ဤနေရာတွင် အသေးစိတ်ဖော်ပြမည်မဟုတ်ပါ။ မော်တာ၏ ပစ္စည်းဆက်တင်များသည် အမှန်တကယ်အသုံးပြုမှုနှင့် ကိုက်ညီမှုရှိရန် အလေးပေးထားသည်။ အမြဲတမ်းသံလိုက်များ၏ နောက်ဆက်တွဲ demagnetization ခွဲခြမ်းစိတ်ဖြာခြင်းကို ထည့်သွင်းစဉ်းစားပါက၊ nonlinear B-H မျဉ်းကွေးများကို အမြဲတမ်းသံလိုက်အတွက် အသုံးပြုရပါမည်။ ဤစာတမ်းသည် Maxwell ရှိ ဆွဲငင်စက်၏ ကြယ်တံဆိပ်ခတ်ခြင်းနှင့် သံလိုက်ပုံသဏ္ဍန်ကို မည်သို့အကောင်အထည်ဖော်ရမည်ကို အလေးပေးဖော်ပြထားသည်။ ဆော့ဖ်ဝဲလ်တွင် ကြယ်တံဆိပ်ခတ်ခြင်းကို အောက်ဖော်ပြပါပုံတွင် ပြထားသည့် သီးခြားဆားကစ်ဖွဲ့စည်းပုံဖြင့် ပြင်ပဆားကစ်တစ်ခုမှတစ်ဆင့် နားလည်သည်။ traction machine ၏ three-phase stator windings ကို circuit အတွင်းရှိ LPhaseA/B/C အဖြစ် ရည်ညွှန်းသည်။ အဆင့်သုံးဆင့် အကွေ့အကောက်များ ၏ ရုတ်တရက် တိုတောင်းသော ကြယ်-တံဆိပ်ခတ်ခြင်းကို အတုယူရန်၊ အပြိုင် module (လက်ရှိ ရင်းမြစ်နှင့် လက်ရှိ ထိန်းချုပ်ထားသော ခလုတ်ဖြင့် ဖွဲ့စည်းထားသည်) ကို အဆင့်တစ်ခုစီမှ အကွေ့အကောက်ပတ်လမ်း တစ်ခုစီဖြင့် အစီအရီ ချိတ်ဆက်ထားသည်။ အစပိုင်းတွင် လက်ရှိထိန်းချုပ်ထားသော ခလုတ်ကို ဖွင့်ထားပြီး၊ အဆင့်သုံးဆင့် လက်ရှိရင်းမြစ်သည် အကွေ့အကောက်များထံ ပါဝါထောက်ပံ့သည်။ သတ်မှတ်အချိန်တစ်ခုတွင်၊ လက်ရှိ ထိန်းချုပ်ထားသော ခလုတ်သည် ပိတ်သွားပြီး၊ အဆင့်သုံးဆင့် လက်ရှိရင်းမြစ်ကို တိုတောင်းကာ ပတ်လမ်းသုံးဆင့် အကွေ့အကောက်များကို တိုစေကာ တိုတောင်းသော ကြယ်တံဆိပ်ခတ်သည့် အခြေအနေသို့ ဝင်ရောက်သည်။
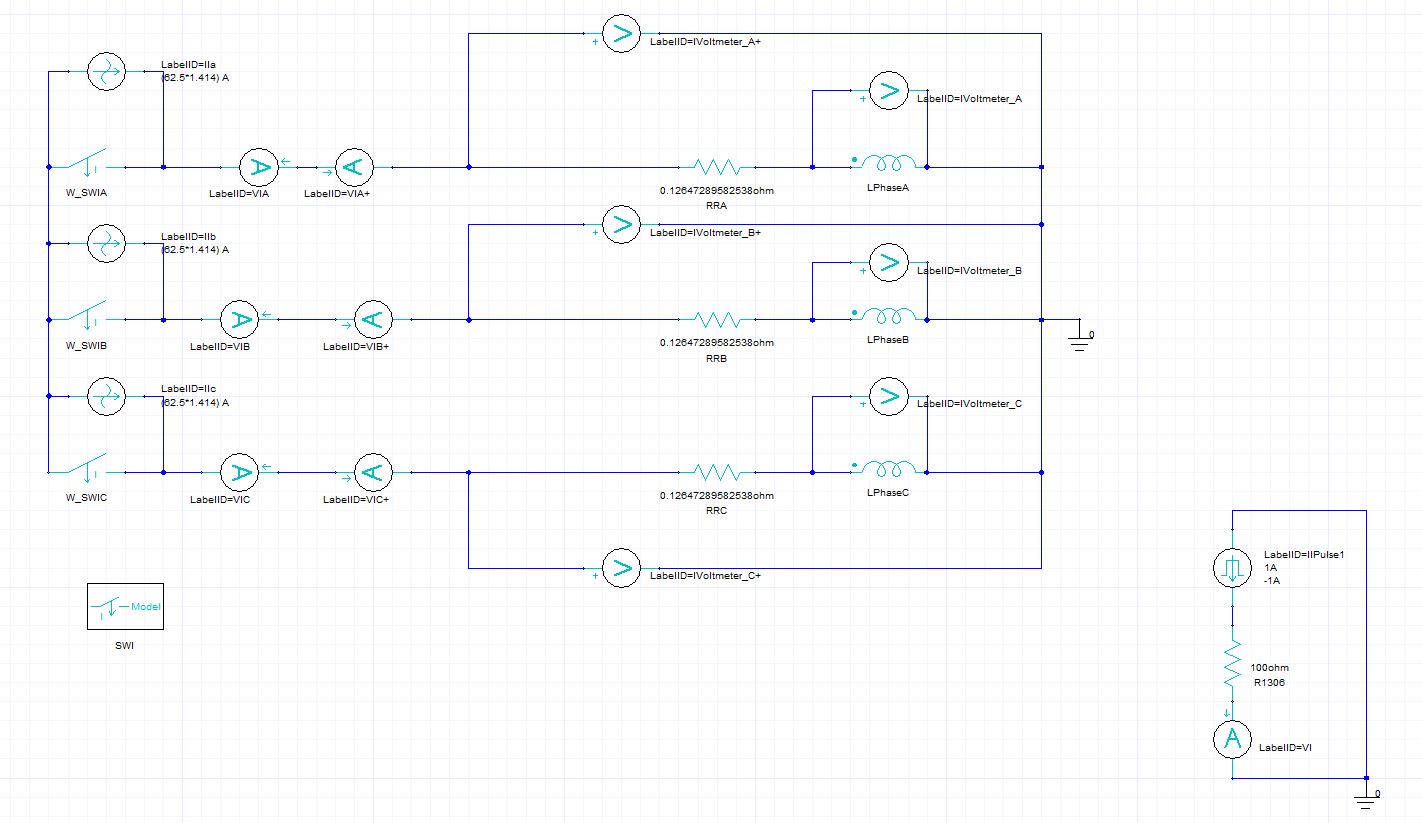
ပုံ 2- Star-Sealing Circuit ဒီဇိုင်း
ဆွဲငင်စက်၏ အမြင့်ဆုံးကြယ်တံဆိပ်ခတ်ထားသော torque သည် 12 rpm အမြန်နှုန်းနှင့် ကိုက်ညီသည်။ စီစဥ်စဉ်အတွင်း၊ တိုင်းတာသည့်အမြန်နှုန်းနှင့် လိုက်လျောညီထွေဖြစ်စေရန်အတွက် အမြန်နှုန်းများကို 10 rpm၊ 12 rpm နှင့် 14 rpm အဖြစ် ကန့်သတ်ထားပါသည်။ အကွေ့အကောက်များသော လျှပ်စီးကြောင်းများသည် နိမ့်သောအမြန်နှုန်းတွင် ပိုမိုမြန်ဆန်စွာ တည်ငြိမ်စေသည်ဟု ထည့်သွင်းစဉ်းစားခြင်း ရပ်တန့်ချိန်နှင့် ပတ်သက်၍ လျှပ်စစ်စက်ဝန်း 2-3 ခုကိုသာ သတ်မှတ်ခဲ့သည်။ ရလဒ်များ၏ time-domain မျဉ်းကွေးများမှ၊ တွက်ချက်ထားသော star-sealing torque နှင့် winding current သည် တည်ငြိမ်သွားကြောင်း ဆုံးဖြတ်နိုင်သည်။ အဆိုပါ simulation တွင် 12 rpm တွင်တည်ငြိမ်သောကြယ်တံဆိပ်ခတ်ထားသော torque သည် အကြီးဆုံးဖြစ်ပြီး 5885.3 Nm တွင်ရှိပြီး၊ တိုင်းတာသည့်တန်ဖိုးထက် 5.6% နိမ့်ကြောင်းပြသခဲ့သည်။ တိုင်းတာထားသော အကွေ့အကောက်များသော လျှပ်စီးကြောင်းမှာ 265.8 A ဖြစ်ပြီး၊ စီစစ်ထားသော လျှပ်စီးကြောင်းသည် 251.8 A ဖြစ်ပြီး၊ တိုင်းတာသည့် တန်ဖိုးထက် 5.6% နိမ့်ကျကာ၊ ဒီဇိုင်းတိကျမှု လိုအပ်ချက်များနှင့် ကိုက်ညီပါသည်။
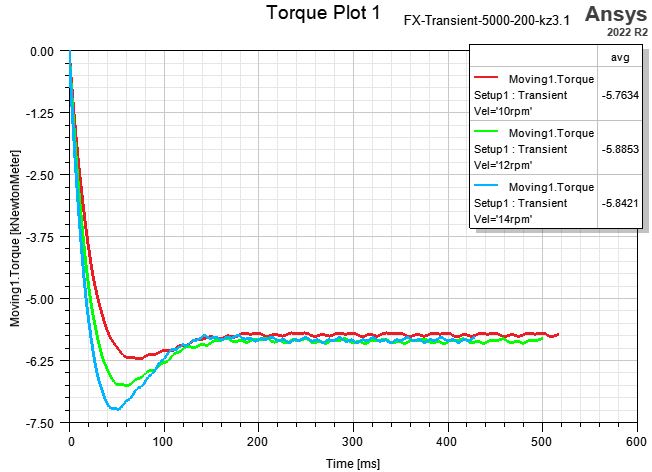
ပုံ 3- Peak Star-Sealing Torque နှင့် Winding Current
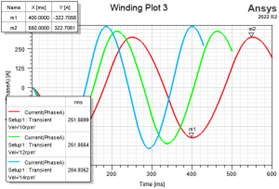
ဆွဲငင်စက်များသည် ဘေးကင်းရေး အရေးကြီးသော အထူးကိရိယာများဖြစ်ပြီး အမြဲတမ်းသံလိုက် ဖယ်ထုတ်ခြင်းသည် ၎င်းတို့၏ စွမ်းဆောင်ရည်နှင့် ယုံကြည်စိတ်ချရမှုကို ထိခိုက်စေသည့် အဓိကအချက်များထဲမှ တစ်ခုဖြစ်သည်။ စံချိန်စံညွှန်းများထက်ကျော်လွန်၍ ပြောင်းပြန်လှန်၍မရသော ဖယ်ထုတ်ခြင်းကို ခွင့်မပြုပါ။ ဤစာတမ်းတွင်၊ Ansys Maxwell ဆော့ဖ်ဝဲလ်ကို ကြယ်ပိတ်သည့်အခြေအနေရှိ တိုတောင်းသောလျှပ်စီးကြောင်းများမှ ဖြစ်ပေါ်စေသော ပြောင်းပြန်သံလိုက်စက်ကွင်းများအောက်ရှိ အမြဲတမ်းသံလိုက်စက်ကွင်းများ၏ demagnetization လက္ခဏာများကို အတုယူရန် အသုံးပြုပါသည်။ အကွေ့အကောက်များသော လက်ရှိလမ်းကြောင်းမှ၊ လက်ရှိအထွတ်အထိပ်သည် 1000 A ထက်ကျော်လွန်နေပြီး လျှပ်စစ်စက်ဝန်း 6 ပတ်အကြာတွင် တည်ငြိမ်သည်။ Maxwell ဆော့ဖ်ဝဲလ်ရှိ ဖယ်ထုတ်မှုနှုန်းသည် ၎င်းတို့၏မူလကျန်ရှိနေသည့် သံလိုက်ဓာတ်အား ဖယ်ထုတ်ခြင်းအကွက်တစ်ခုနှင့် ထိတွေ့ပြီးနောက် အမြဲတမ်းသံလိုက်၏ကျန်ရှိသံလိုက်များ၏ အချိုးကိုကိုယ်စားပြုသည်။ 1 ၏တန်ဖိုးသည် demagnetization မရှိခြင်းကိုဖော်ပြပြီး 0 သည် ပြီးပြည့်စုံသော demagnetization ကိုဖော်ပြသည်။ demagnetization curves နှင့် contour maps မှ၊ အမြဲတမ်း သံလိုက် demagnetization rate သည် 1 ဖြစ်ပြီး၊ demagnetization ကို မလေ့လာဘဲ၊ simulated traction machine သည် ယုံကြည်စိတ်ချရမှု လိုအပ်ချက်များနှင့် ကိုက်ညီကြောင်း အတည်ပြုပါသည်။
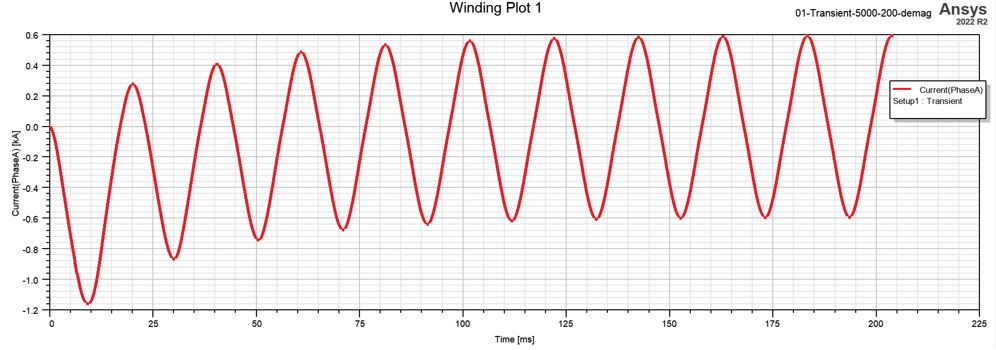
ပုံ 4- အဆင့်သတ်မှတ်ထားသော အမြန်နှုန်းဖြင့် Star-Sealing အောက်ရှိ Winding Current ၏ Time-Domain Curve
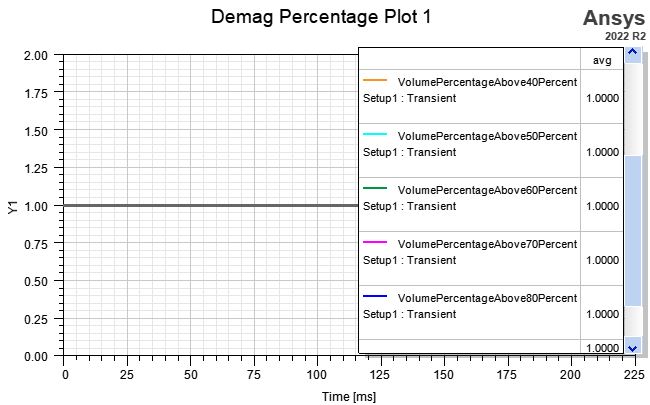
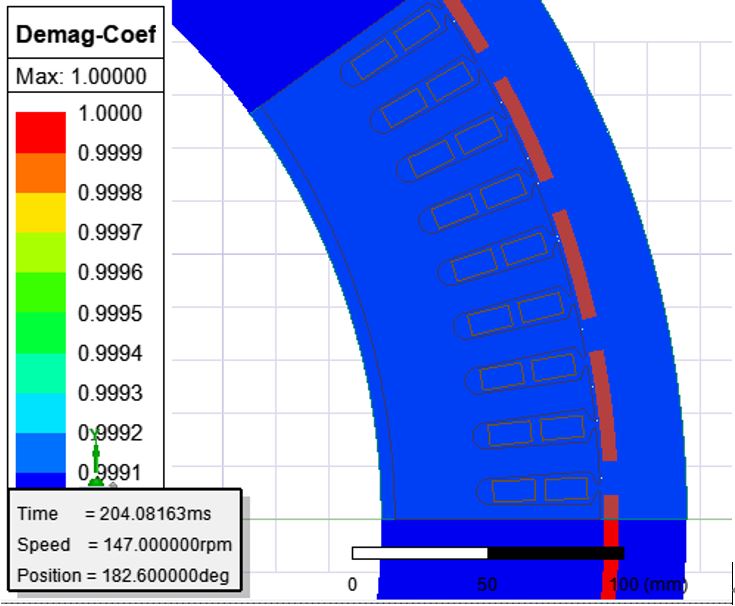
ပုံ 5- Demagnetization Rate Curve နှင့် Demagnetization Contour Map of Permanent Magnet
နက်ရှိုင်းခြင်းနှင့် Outlook
simulation နှင့် တိုင်းတာခြင်း နှစ်မျိုးလုံးအားဖြင့်၊ traction machine ၏ ကြယ်တံဆိပ်ခတ်ထားသော torque နှင့် အမြဲတမ်း magnet demagnetization တို့၏ အန္တရာယ်ကို ထိထိရောက်ရောက် ထိန်းချုပ်နိုင်ပြီး၊ စွမ်းဆောင်ရည်ပိုကောင်းအောင် ခိုင်မာသော အထောက်အပံ့နှင့် traction machine ၏ ဘေးကင်းသော လည်ပတ်မှုနှင့် ကြာရှည်မှုတို့ကို သေချာစေသည်။ ဤစာတမ်းသည် အမြဲတမ်းသံလိုက်ပြိုင်တူဆွဲခြင်းစက်များတွင် ကြယ်တံဆိပ်ခတ်ထားသော torque နှင့် demagnetization တို့ကို တွက်ချက်ရုံသာမက ဓာတ်လှေကားဘေးကင်းရေးနှင့် စွမ်းဆောင်ရည်ပိုကောင်းအောင် မြှင့်တင်မှုကိုလည်း အခိုင်အမာအားပေးပါသည်။ ပညာရပ်ဆိုင်ရာ ပူးပေါင်းဆောင်ရွက်မှုများနှင့် ဖလှယ်မှုများမှတစ်ဆင့် ဤနယ်ပယ်တွင် နည်းပညာတိုးတက်မှုနှင့် ဆန်းသစ်သောအောင်မြင်မှုများကို မြှင့်တင်ရန် ကျွန်ုပ်တို့ မျှော်လင့်ပါသည်။ အမြဲတမ်းသံလိုက်ထပ်တူဆွဲတင်စက်များ၏စွမ်းဆောင်ရည်ကိုမြှင့်တင်ရန်နှင့် ဓာတ်လှေကားများ၏ဘေးကင်းသောလည်ပတ်မှုကိုသေချာစေရန်အတွက် ဉာဏ်ပညာနှင့်ကြိုးပမ်းအားထုတ်မှုများကို ပံ့ပိုးကူညီရန် သုတေသီများနှင့် လေ့ကျင့်ပညာရှင်များကို ထပ်မံတောင်းဆိုပါသည်။
သတင်းအကြံပြုချက်များ

တွေ့ဆုံခြင်း "ဒေါ်" | Nideco ဓာတ်လှေကား အစိတ်အပိုင်းများကို 2026 China International Elevator Exhibition တွင် ပွဲဦးထွက် ပြုလုပ်ခဲ့သည်။
2026-06-20
Nidec ဓာတ်လှေကား အစိတ်အပိုင်းများ Guangde Co., Ltd. သည် Core Elevator အစိတ်အပိုင်းများအတွက် ကမ္ဘာလုံးဆိုင်ရာ ဉာဏ်ရည်မြင့် ထုတ်လုပ်ခြင်း အဆင့်မြှင့်တင်ခြင်းကို အားကောင်းစေမည့် ကြီးကြီးမားမား ဖွင့်လှစ်ပြီး၊
2026-06-20
ပိုးလမ်းမပေါ်ရှိ အခွင့်အလမ်းသစ်များ- ကာဇက်စတန်၏ ဓာတ်လှေကားဈေးကို စူးစမ်းပါ။
2026-06-20
Nidec Ultra-Thin Machine Retrofit ဖြေရှင်းချက်
2026-03-21
stator အတွက် modular single teeth winding သည် စွမ်းဆောင်ရည်မြင့်မားသော ထုတ်လုပ်မှုအတွက် စံသစ်တစ်ခု သတ်မှတ်ပေးပါသည်။
2026-03-02